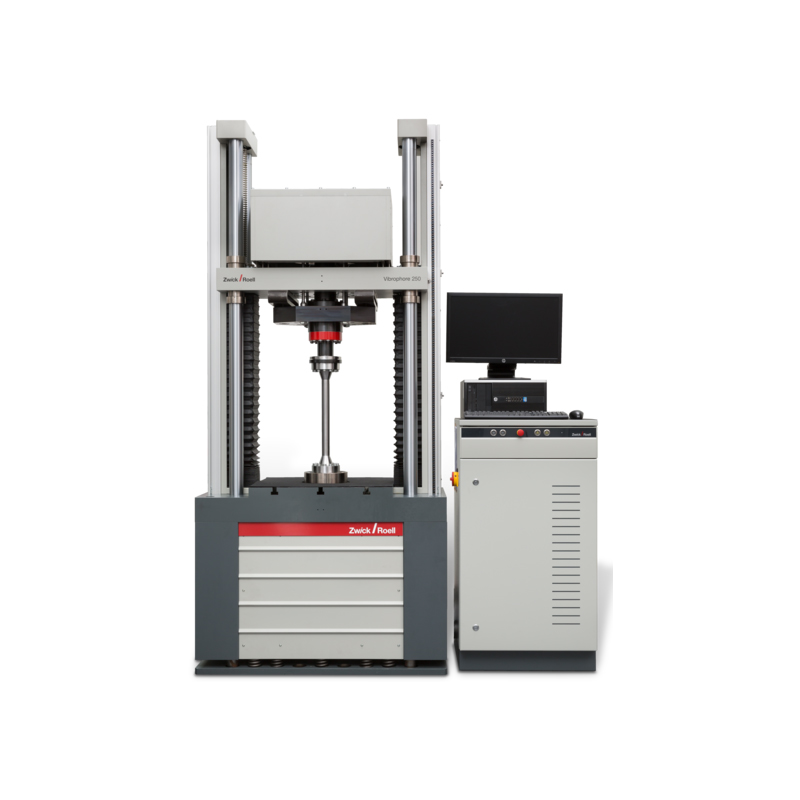
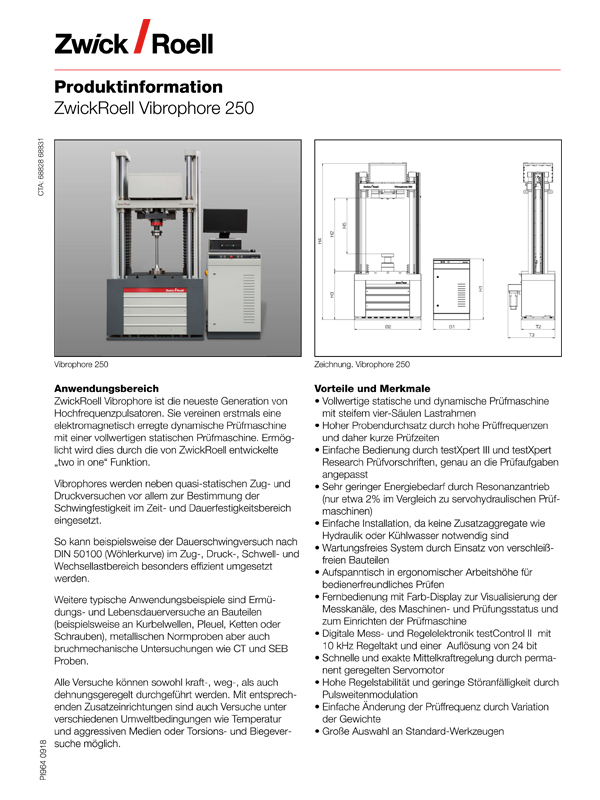
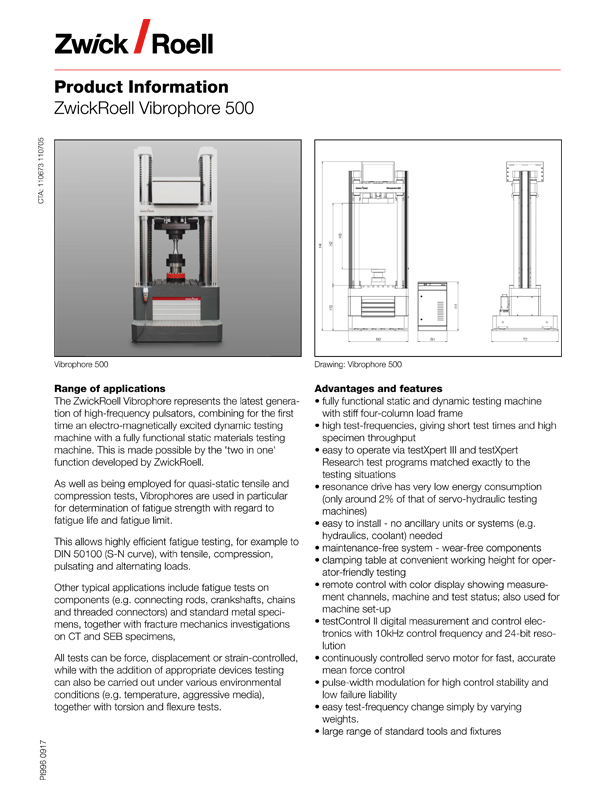
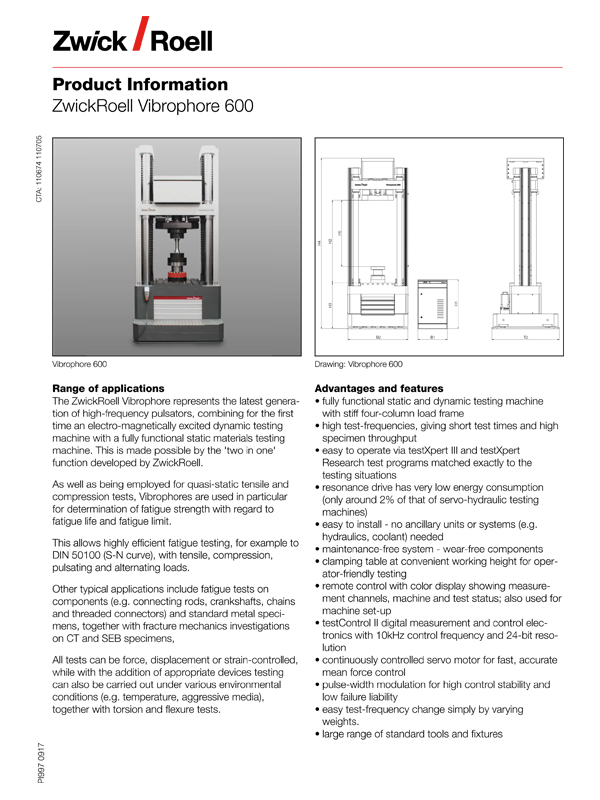
用于静态和动态试验的共振试验系统
共振试验系统的操作原理是基于电磁驱动的机械谐振器的概念。动态载荷是由系统在共振时工作的振动系统生成的。平均力是通过移动带滚珠丝杠驱动的上横梁施加的。
基于设计原理,共振试验系统和共振试验机过去只能用作动态材料试验机,用于测定材料和部件的疲劳寿命,如有限寿命疲劳和长寿命疲劳等。 例如,按照DIN 50100(S-N曲线)在拉伸、压缩、脉冲载荷和交变载荷范围进行高周疲劳试验。
新一代的ZwickRoell Vibrophore试验机(高频振动器)能同时用作动态和静态材料试验机,这是首台此类试验机,试验载荷达1,000 kN。<br/><br/>共振试验系统的典型应用是标准试样和部件(例如,活塞杆、曲轴和螺栓)疲劳试验和耐久性试验、在使用时承受动态载荷的部件(例如螺纹钢)的生产和质量控制、准静态拉伸和压缩试验,以及CT和SEB试样的断裂力学试验。
优势及特点
得益于坚固的四立柱机架,机架得到优化,
从而具有精确的同轴度,
防止对试样产生机械影响,
可得到精确的测量结果
长横梁行程使短试样和长试样都能得到可靠的测试结果
较低的工作台实现了符合人体工学的操作
得益于集成的横梁位移测量系统,总能根据不同的试样,重复地和精确地定义上下夹具之间的距离
无易损件,因而维护费用最低
无需辅助设备(如液压源、冷却液、压缩空气)即可轻松安装
“二合一”- 优势
Vibrophore是一台全功能的动态和静态试验机
因其高频率的特点,动态试验可以在短时间内测试大量试样
因其共振原理,所需能量最少(仅为电液伺服疲劳试验机的2%)
动态试验
材料和部件可能在承受动态载荷时过早失效。因此,材料在交变机械载荷下的性能是一个很重要的指标,必要的数据可通过试验获得。
在材料测试中,疲劳分为两类:
测定低周疲劳强度 – 低周疲劳(LCF)试验
测定有限寿命疲劳强度和高周疲劳强度 – 高周疲劳(HCF)试验/S-N试验
ZwickRoell Vibrophore的操作原理是基于电磁驱动的机械谐振性的概念。平均载荷是通过连接主滚珠丝杆的上横梁的移动施加的。动态试验力是由通过系统在共振时的振动系统生成的。所测试的试样具备高刚度时,试验频率达到285Hz是有可能的。静态和动态驱动是单独控制的,因此可以得到任何应力比(应力比R)。试验可以是应力、位移或应变控制。
静态试验
得益于振荡横梁的机械固定装置和testXpert III软件的部署,Vibrophore转化成一台完全的静态材料试验机。
大接触面积和坚固的零部件保证了试验机的高刚度。配合精确的横梁导向,最大程度降低了对试样不希望的机械影响。使用适合的附件,静态和动态试验可以在多样的环境(温度、腐蚀性介质)下进行,Vibrophore高频疲劳试验机也可以通过配置用于扭转和弯曲试验。新的Vibrophore没有中心主滚珠丝杆,使得测试区域的多功能性达到最大,意味着其可以测试很短的试样或很大的部件。
技术概览
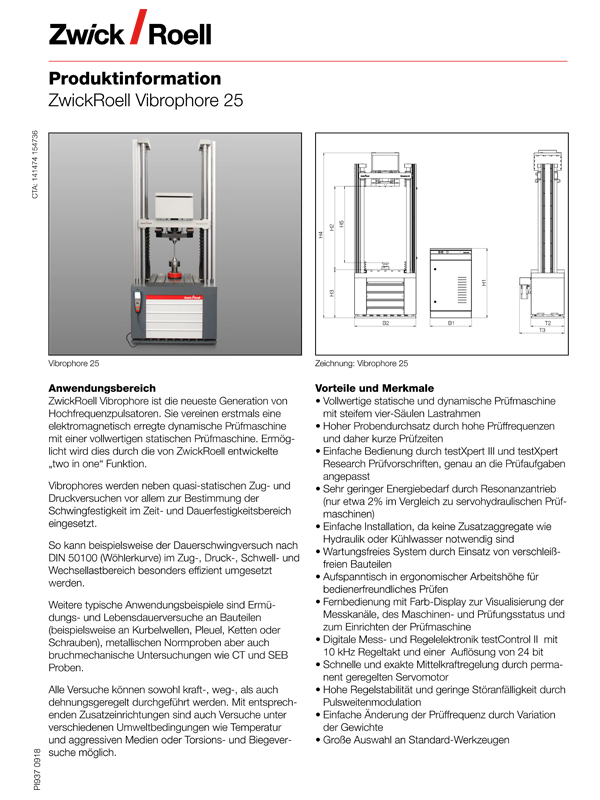
Fmax | 25/50 | kN |
平均载荷,最大 | ±25/±50 | kN |
载荷幅,最大 | ±12.5 | kN |
试样弹性应变(振荡位移),最大 | 6 (±3) | mm |
试验频率范围1 | 35至300 | Hz |
频率级数2 | 8 |
导向柱数 | 4 |
滚珠丝杆驱动数 | 2 |
横梁间距为1000mm时的机架刚度3 | 约170 | kN/mm |
驱动 |
静态试验和平均力控制 | 交流驱动 |
最小横梁速度 | 0.0001 | mm/min |
最大横梁速度 | 600 | mm/min |
最大横梁回程速度 | 1000 | mm/min |
横梁上的重复定位精度 | ±2 | µm |
电机停机抱闸 | 是 |
动态试验 | 无磨损电磁驱动 |
试验机机架尺寸 |
H4 - 高度 | 2375 | mm |
H3 - 夹紧台高度 | 693 | mm |
H2 - 试验区域高度 | 1200 | mm |
H5 - 试验区域高度(包括力测量链) | 1100 | mm |
B2 - 宽度 | 890 | mm |
T3 - 深度 | 645 | mm |
T2 - 基座深度 | 482 | mm |
重量(近似值)4 | 1900 | kg |
试验区域尺寸 |
试验区域高度(不带力传感器) | 1200 | mm |
试验区域深度 | 482 | mm |
立柱之间的自由进入宽度 | 6105 | mm |
试验机机架最大行程 | 1099 | mm |
订货号 |
Vibrophore 25(含testControl II) | 1050926 |
可选:静态试验二合一 | 1028357 |
可选:振荡位移测量 | 1033236 |
1、试验频率由试验装置的刚度和质量决定。
2、通过重量激活/停用
3、试验机机架刚度:该值是通过直接测量横梁(移动横梁和底部横梁)之间的变形获得的,不考虑驱动装置和力传感器的变形。
4、不带试样夹具或工装的重量
5、不带防尘帘罩
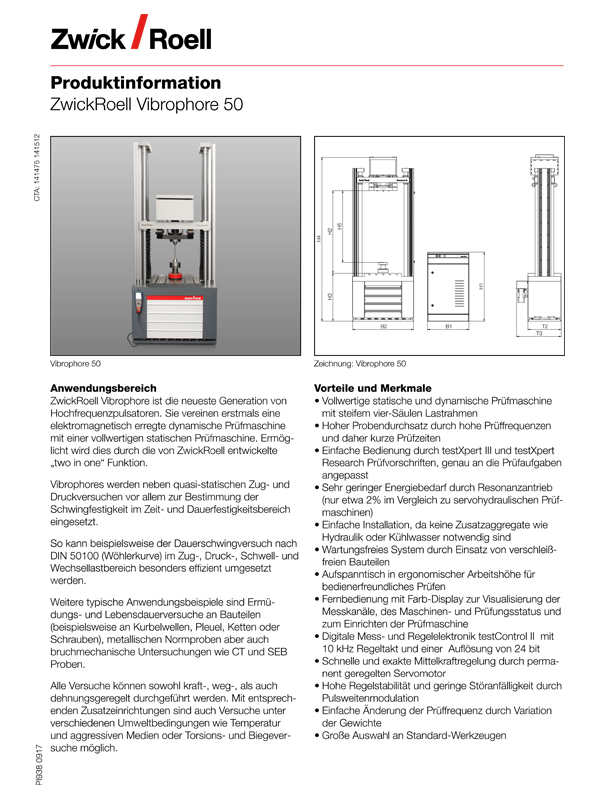
Fmax | 100/250 | kN |
平均载荷,最大 | ±100/±250 | kN |
载荷幅,最大 | ±50/±125 | kN |
试样弹性应变(振荡位移),最大 | 6 (±3) | mm |
试验频率范围1 | 30 ...285 | Hz |
频率级数2 | 8 |
导向柱数 | 4 |
滚珠丝杆驱动数 | 2 |
横梁间距为1000mm时的机架刚度 3 | 约380 | kN/mm |
驱动 |
静态试验和平均力控制 | 交流驱动 |
最小横梁速度 | 0.0001 | mm/min |
最大横梁速度 | 600 | mm/min |
最大横梁回程速度 | 1000 | mm/min |
横梁上的重复定位精度 | ±2 | µm |
电机停机抱闸 | 是 |
动态试验 | 无磨损电磁驱动 |
试验机机架尺寸 |
H4 - 高度 | 2565 | mm |
H3 - 夹紧台高度 | 794 | mm |
H2 - 试验区域高度 | 1200 | mm |
H5 - 试验区域高度(带力传感器) | 1007 | mm |
B2 - 宽度 | 1094 | mm |
T3 - 深度 | 770 | mm |
T2 - 基座深度 | 553 | mm |
近似重量4 | 3200 | kg |
试验区域尺寸 |
试验区域高度(不带力传感器) | 1200 | mm |
试验区域深度 | 550 | mm |
立柱之间的自由进入宽度 | 6265 | mm |
试验机机架最大行程 | 977.5/925 | mm |
订货号 |
Vibrophore 100(含testControl II) | 084142/1001253 |
可选:静态试验二合一 | 1009579/1009581 |
可选:振荡位移测量 | 1001259 |
1、试验频率由试验装置的刚度和质量决定。
2、通过重量激活/停用
3、试验机机架刚度:该值是通过直接测量横梁(移动横梁和底部横梁)之间的变形获得的,不考虑驱动装置和力传感器的变形。
4、不带试样夹具或工装的重量
5、不带防尘帘罩
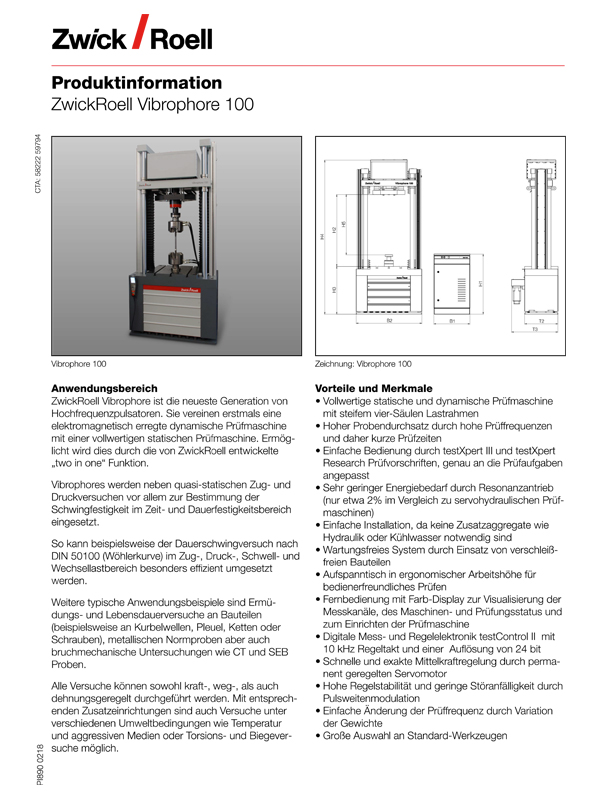
Fmax | 500 | kN |
平均载荷,最大 | ±500 | kN |
载荷幅,最大 | ±250 | kN |
试样弹性应变(振荡位移),最大 | 4 (± 2) | mm |
试验频率范围1 | 35至285 | Hz |
频率级数2 | 8 |
导向柱数 | 4 |
滚珠丝杆驱动数 | 2 |
横梁间距为1000mm时的机架刚度3 | 约960 | kN/mm |
驱动 |
静态试验和平均力控制 | 交流驱动 |
最小横梁速度 | 0.0001 | mm/min |
最大横梁速度 | 250 | mm/min |
最大横梁回程速度 | 1000 | mm/min |
横梁上的重复定位精度 | ± 2 | µm |
电机停机抱闸 | 是 |
动态试验 | 无磨损电磁驱动 |
试验机机架尺寸 |
H4 - 高度 | 3465 | mm |
H3 - 夹紧台高度 | 930 | mm |
H2 - 试验区域高度 | 1680 | mm |
H5 - 试验区域高度(带力传感器) | 1347 | mm |
B2 - 宽度 | 1220 | mm |
T1 - 深度 | 1369 | mm |
重量(近似值)4 | 9000 | kg |
试验区域尺寸 |
试验区域高度(不带力传感器) | 1700 | mm |
试验区域深度 | 640 | mm |
立柱之间的自由进入宽度 | 7805 | mm |
试验机机架最大行程 | 1700 | mm |
订货号 |
Vibrophore 500(含testControl II) | 1011633 |
可选:静态试验二合一 | 1012275 |
可选:振荡位移测量 | 1012273 |
1、试验频率由试验装置的刚度和质量决定。
2、通过重量激活/停用
3、试验机机架刚度:该值是通过直接测量横梁(移动横梁和底部横梁)之间的变形获得的,不考虑驱动装置和力传感器的变形。
4、不带试样夹具或工装的重量
5、不带防尘帘罩
Fmax | 600 | kN |
平均载荷,最大 | ±600 | kN |
载荷幅,最大 | ±300 | kN |
试样弹性应变(振荡位移),最大 | 4 (±2) | mm |
试验频率范围1 | 30 ...265 |
.modelist li.mian_cat,li { /* list-style: none; */ }
li.mian_cat{ clear:both; width:100%; }
.catlevel_2 li{ float:left; min-width: 100px; }
.ct_btn{border-radius: 0.04rem;
width: 1.45rem;
padding: 0 0.15rem;
text-align: center;
font-size: 0.15rem;
line-height: 0.4rem;
color: #ffffff;
background-color: #4293f4; clear: both; display: block;
}
.markdown-body table {
border-collapse: collapse;
border-spacing: 0;
}
.markdown-body td,
.markdown-body th {
padding: 0;
}
.markdown-body * {
-moz-box-sizing: border-box;
box-sizing: border-box;
}
.markdown-body table {
width: 100%;
overflow: auto;
word-break: normal;
word-break: keep-all;
}
.markdown-body table th {
font-weight: bold;
background-color: #efefef;
}
.markdown-body table th,
.markdown-body table td {
padding: 6px 13px;
border: 1px solid #ccc;
}
.markdown-body table tr {
background-color: #fff;
border-top: 1px solid #ccc;
}
.markdown-body table tr:nth-child(2n) {
background-color: #f9f9f9;
}
|